



1:1 Axis Mapping: Mirror 256+ servo motors in virtual space
Collision Prevention: Detect interference risks before load-in
Artistic Preview: Visualize complex movements with lighting/media sync
| Traditional Method | Pando 3D Solution |
|---|---|
| Weeks of on-site debugging | offline virtual rehearsal |
| Trial-and-error adjustments | Precise first-time execution |
| Limited previsualization | Full 3D show simulation |
The Future of Stage Machinery Programming - From Virtual Design to Flawless Execution
"Digital Twins for Live Entertainment"
Pando 3D pioneers a groundbreaking workflow where:
✅ Virtual axes perfectly mirror physical motors (via EtherCAT/PLC)
✅ Object-based control replaces manual motor manipulation
✅ Full show lifecycle coverage from design to performance
| Traditional Approach | Pando 3D Advantage |
|---|---|
| Direct motor control | Object-shape manipulation |
| Axis-by-axis programming | Group movement presets |
| Physical trial-and-error | Risk-free virtual validation |
Key Features:
256+ physical motor synchronization
Preset motion libraries (waves, spirals, lifts)
Matrix/circular array tools for rapid rigging
Timeline Editor
Drag-and-drop keyframe animation
Multi-axis coordination visualization
Automatic collision detection
Debugging Suite
Limit overrun alerts with auto-correction
Synchronization deviation analysis
90% reduction in on-site debuging time
Supported Devices:
Touchscreen consoles (21.5" 1080P)
Tablets & smartphones (iOS/Android)
Desktop workstations
Remote Collaboration:
Cloud-based project sharing
Multi-user permission tiers
Real-time co-editing
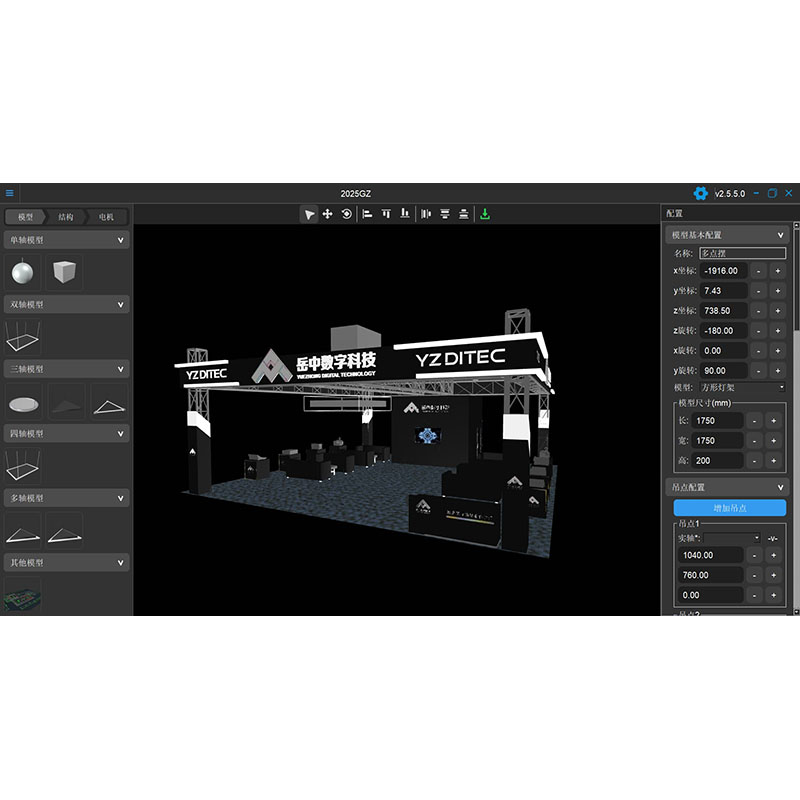
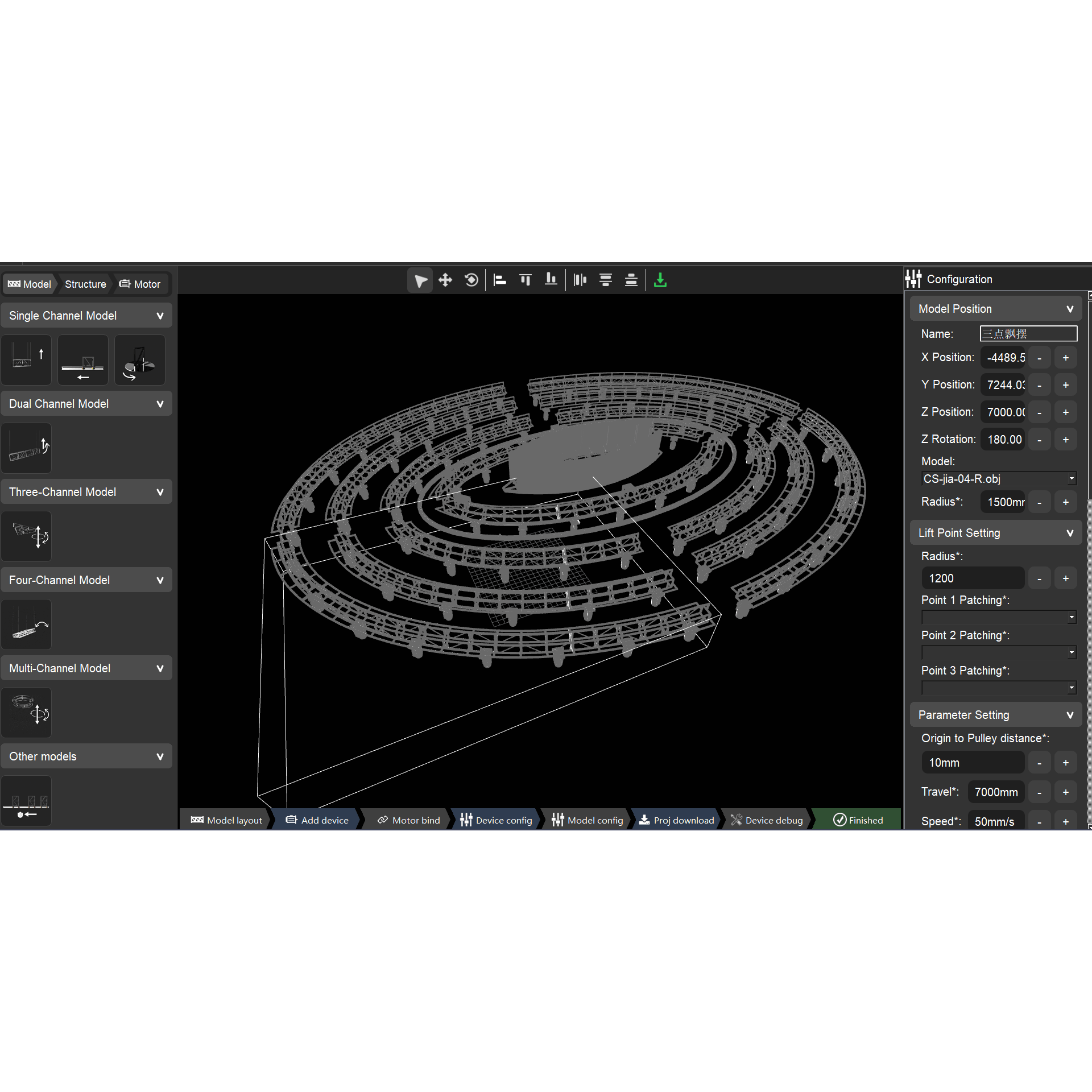
Config Platform

Config platform is to build constructure mode, to build easy or complicated mode is easy way here.
In this windows, you can directly import pre-made 3D models;
Or you can drag some pre-set mode, such as single axes, dual axes, 3 axes, 4 axes.
Following steps:
1, drag the mode;
2, setting the parameter;
3, match the motor to each axes.
4, save.
Parameter setting:

in "structure" menu, you can set the device mater-slave relationship.
Debug Platform
(Advanced Access – For Authorized Personnel Only)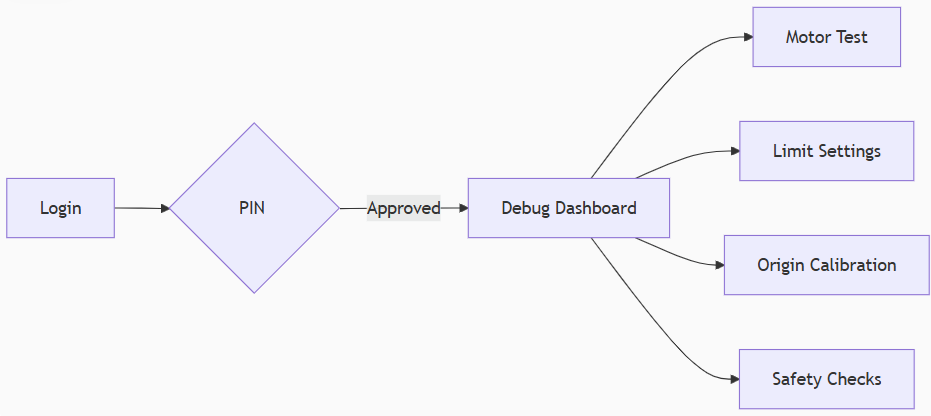
🔐 Restricted Mode: High-level access for system engineers only
⚙️ Critical Functions:
Motor test runs & calibration
Limit switch configuration
Origin point setting
Safety circuit validation
✅ Wireless Multi-Device Control
Operate via smartphone/tablet/computer with real-time telemetry
Supports WiFi connectivity for field work
✅ Live System Monitoring
Graphical display of:
Motor position/speed/torque
Temperature/voltage/current
EtherCAT network health
✅ Instant Fault Alerts
Push notifications to mobile devices on:
Limit breaches
Communication faults
Overload conditions
🛑 Dual Authentication (Password + Hardware Key)
📊 Audit Trail: Logs all parameter changes with timestamp/user ID
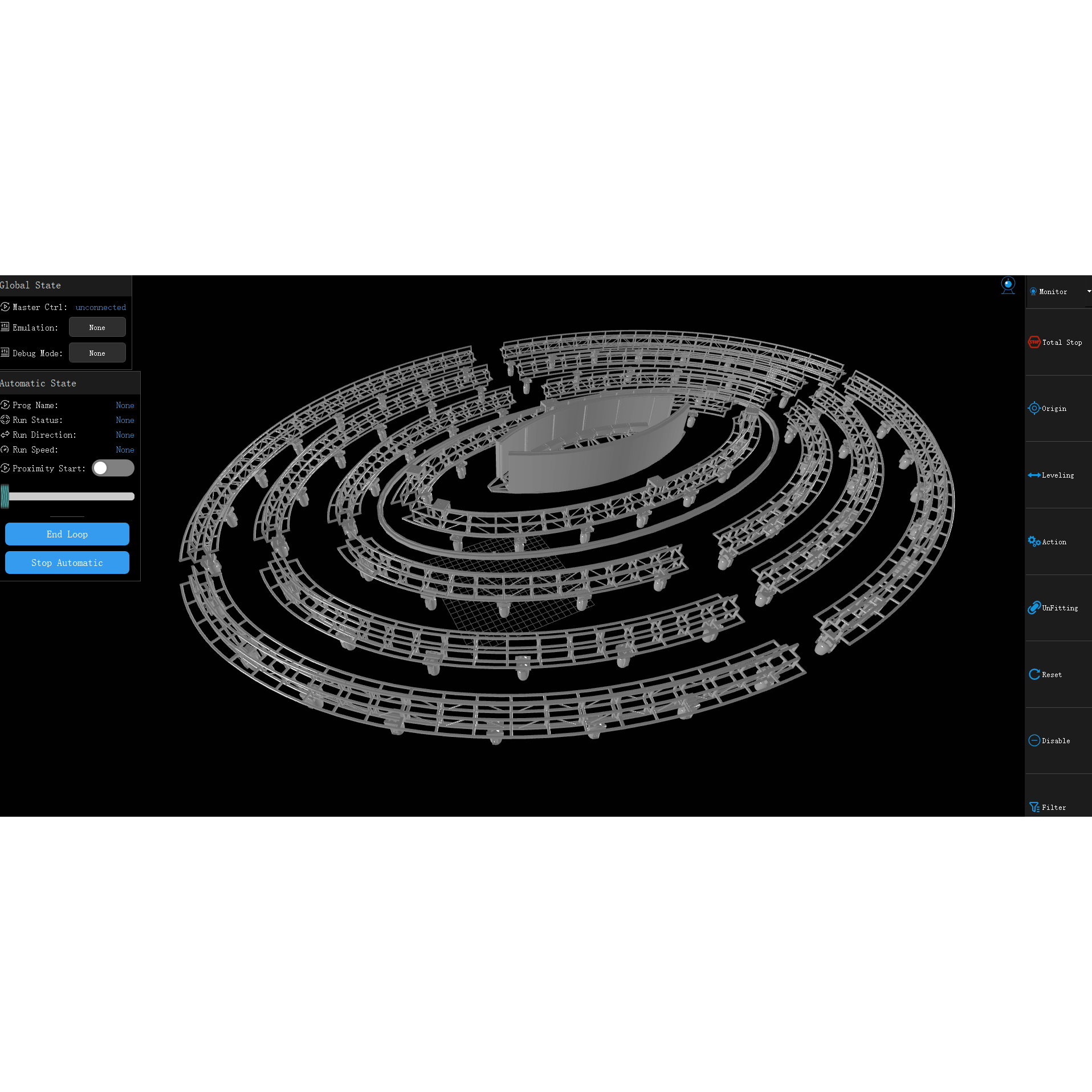
Operation Platform

Purpose: Direct motor control for setup/testing
Functions:
Position Direct Input
Enter exact coordinates (mm/°) for single-axis movement
Real-time position feedback with 0.1mm resolution
Posture Recall
Execute pre-saved positions ("cues")
Supports 60 posture presets
Timeline-Based Motion Design:
Features:
Drag-and-drop keyframe editing
Curve interpolation options:
Linear
Bézier (S-curve)
Step function
Multi-axis synchronization markers
| DMX Channel | Function |
|---|---|
| 1-16 | Posture Selection |
| 25-32 | Auto-Prog |
| Stop |
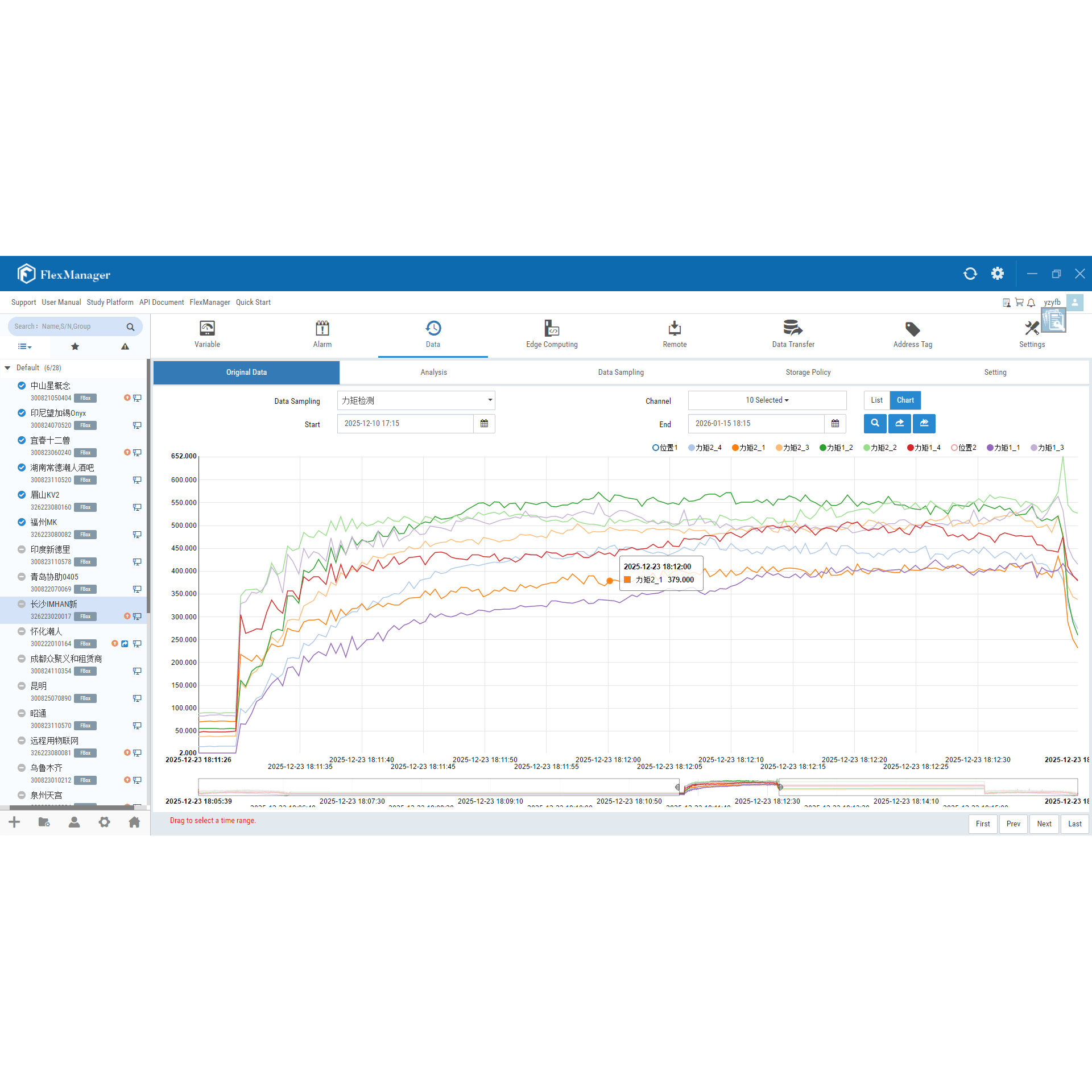
3D view and running data

View synchronized 3D model operation status matching physical machinery
Monitor key motor parameters:
Position
Speed
Load ratio
Temperature
Weight value
Alarm codes
Combine multiple motors into simplified virtual controls:
Lifting parameters
Tilt parameters
Rotation parameters
Streamlines operation of complex mechanical systems
Enable "Model Protection" when saving configurations
Automatic trajectory analysis:
Detects overlapping/conflicting movement paths
Ensures safe equipment operation
Provides safety warnings before execution
Virtual and physical motor data displayed side-by-side
Real-time performance monitoring
Automatic deviation alerts
Technical Advantages
| Category | Specification |
|---|---|
| System Compatibility | Windows/Linux |
| Cloud Storage | Programs and models stored in cloud-based standardized mechanical library |
| Configuration Interface | - Motor bus topology setup - Motion/limit parameter configuration |
| Programming Interface | - Preset motion editing - Timeline keyframing |
| Operation Interface | - Motion programming - Posture playback - Absolute positioning - Mechanical monitoring |
| Action Storage | 360 static motions + 360 dynamic motions per project |
| Control Capacity | - 256 axes maximum - 128 axes in ring network |
| Controller Support | 1 main controller connection |
| Position Accuracy | 1mm |
| Time Accuracy | 0.1s |
| Language Support | Chinese/English |

The BW Console revolutionizes stage automation as the first integrated control terminal combining: Industrial-grade motion control (0.1mm precision) Built-in Pando 3D simulation (virtual-to-real closed-loop workflow) Rental-optimized architecture (plug-and-play deployment) Dual-console redundancy (seamless hot-backup failover – dual operation, zero interruption) Core Advantages 1. Virtual & Real Synchronization, "Debug in 3D, Execute with Confidence" Offline Programming: Pre-visualize complex scenes in Pando 3D Virtual Rehearsals: Test cues without moving physical machinery Real-time Adjustment: On-site tweaks sync automatically with simulation 2. Tested Reliability Feature Technical Benefit Dual-mode E-stop Complies with EN 60204-1 Cat.0 (power cut) & Cat.1 (controlled stop) Fiber-optic communication 2km+ interference-free signal transmission to BW-MC™ main controller DMX512 integration Seamless triggering from lighting consoles (ArtNet/sACN optional)
Details
Core Innovation: "Simulate with Confidence, Execute with Precision"Pando 3D revolutionizes stage automation as the first fully-integrated virtual control system, transforming physical servo axes (hoists/lifts/turntables) into programmable virtual elements for risk-free preproduction. Key Features 1. Digital Twin Technology 1:1 Axis Mapping: Mirror 256+ servo motors in virtual space Collision Prevention: Detect interference risks before load-in Artistic Preview: Visualize complex movements with lighting/media sync 2. Workflow Advantages Traditional Method Pando 3D Solution Weeks of on-site debugging offline virtual rehearsal Trial-and-error adjustments Precise first-time execution Limited previsualization Full 3D show simulation
Details
The Intelligent Core of Black Warrior Stage Automation System System Overview Developed by YZ DITEC, the BW-MC is the central control brain for professional stage machinery, combining:✔ Multi-axis synchronous control (up to 256 axes)✔ Sub-millimeter precision (±0.5mm positioning accuracy)✔ Rental-optimized architecture (modular & scalable) Key Features 1. Advanced Motion Control EtherCAT-based topology (1ms refresh rate) Virtual axis mapping for complex trajectories 2. Intelligent Management Motor health diagnostics Temperature/load threshold alerts 3. Safety Ecosystem Triple-redundant E-stop circuits (Cat.0/1/2) Dynamic limit adjustment during operation
Details
Precision Motion Controller for Stage Automation Product Overview The BW-DC Drive Controller is a high-performance motion control unit of the Black Warrior System, engineered by YZ DITEC for professional stage machinery. Designed to pair with the BW-MC Servo Main Controller (stage automation central processor), it delivers: Multi-axis precision control for servo hoists/winches Rapid deployment and scalable configurations for rental markets Real-time monitoring of absolute encoder servo motor Key Features Performance Safety & Control ✔ Flexible Layout: Controls multiple execution units with synchronized motion ✔ Triple-Layered Safety: Combines hardware, software, and main controller safeguards ✔ High Precision: Sub-millimeter positioning accuracy for smooth automation ✔ Built-in Safety Module: Overload protection, dual brake control, limit detection ✔ Real-Time Data: Continuous feedback on motor position, speed, and torque ✔ Panel Configuration: Local motor parameter setup and status monitoring
Details
Robust Power Management for Black Warrior Automation Systems 1. Professional-Grade Power Distribution Balanced Load Management: Prevents phase imbalance Cascadable Design: Expandable for large installations 2. Enhanced Safety Dual-Level Protection: Magnetic thermal breakers Emergency cut-off switches Visual Indicators: Phase status LEDs 3. Tour-Ready Construction Flight Case Option: 50mm foam padding IP54-rated connectors
Details
 Tel : +86 13714472831
Tel : +86 13714472831 Email : ysstagetech@gmail.com
Email : ysstagetech@gmail.com No18, Wenchang road, Hailong street, Liwan district, Guangzhou, China
No18, Wenchang road, Hailong street, Liwan district, Guangzhou, China




 IPv6 network supported
Blog
| Sitemap
| XML
| Privacy Policy
IPv6 network supported
Blog
| Sitemap
| XML
| Privacy Policy
 English
English español
español русский
русский 한국의
한국의 العربية
العربية
